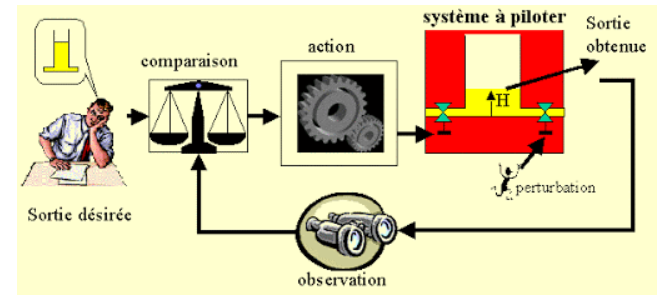
The goal of this course is to provide the theoretical and methodological tools for analyzing the stability and behavior of nonlinear systems (limit cycles, chaos), which the linear approach cannot handle. To this end, it presents analysis techniques such as phase plane analysis, the describing function method, and Lyapunov theory. It also introduces passivity and Popov criteria to assess the absolute stability of feedback systems. Finally, it covers differential geometry in order to linearize these systems via state feedback. The ultimate aim is to master advanced control methods, such as sliding mode control, to effectively control these complex systems.
- Teacher: Karim BELALIA
Les TPs Electronique appliqués S2 M1 Auto
- Teacher: Djilali HAMRI
A Programmable Logic Controller (PLC) or Programmable Controller is a rugged industrial computer suitable for controlling manufacturing processes, such as assembly lines, machinery, robotic devices, or any activity requiring high reliability, ease of programming, and process fault diagnosis. 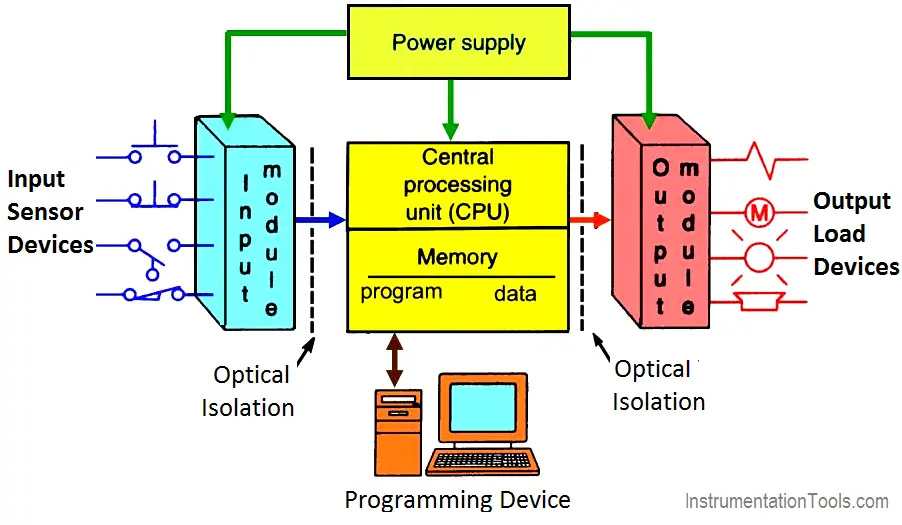
- Teacher: Benyssaad YSSAAD

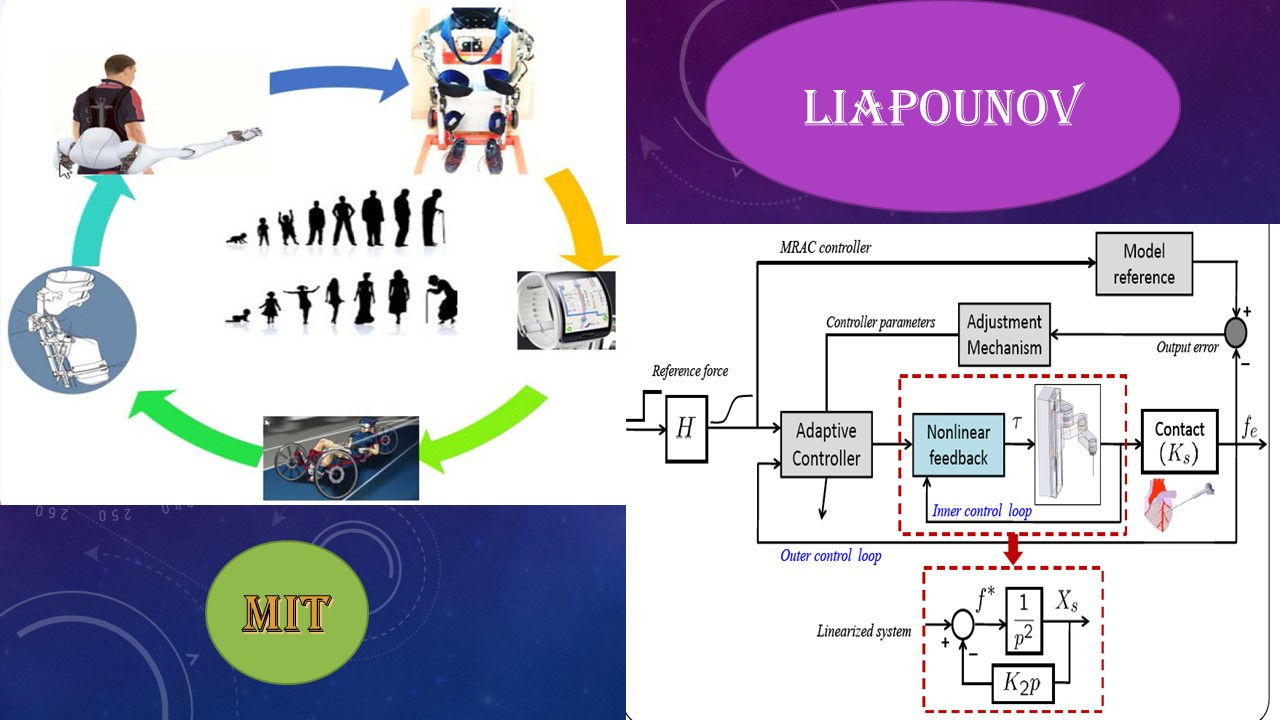
Adaptive predictive control is a control strategy that combines model predictive control (MPC) with online system identification to adapt to changing process dynamics. It uses a predictive model to calculate future control actions by minimizing a cost function over a control horizon, while also continuously updating the model based on real-time data to account for uncertainties or changes in the system. This approach allows it to maintain performance in applications where system parameters are not constant, such as with nonlinear processes, variable dead times, or changing operating conditions.
- Teacher: HAKIM AIT SAID